
Development of a Robotic System for Automated Decaking of 3D-Printed parts
Huy Nguyen, Nicholas Adrian, Joyce Lim Xin Yan, Jonathan M. Salfity, William Allen, Quang-Cuong Pham
IEEE International Conference on Robotics and Automation 2020
[preprint] [video]
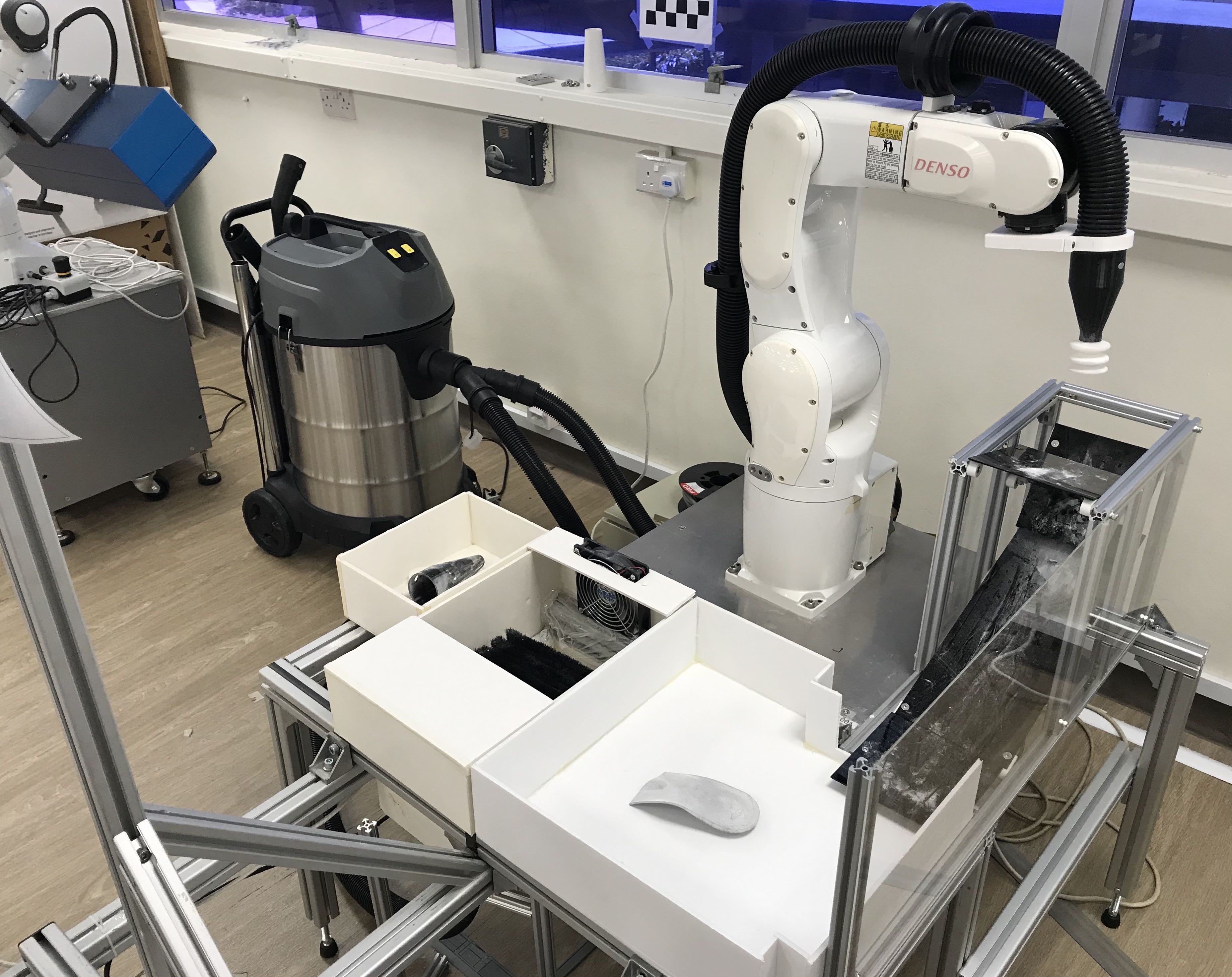
With the rapid rise of 3D-printing as a competitive mass manufacturing method, manual “decaking” – i.e. removing the residual powder that sticks to a 3D-printed part – has become a significant bottleneck. Here, we introduce, for the first time to our knowledge, a robotic system for automated decaking of 3D-printed parts. Combining Deep Learning for 3D perception, smart mechanical design, motion planning, and force control for industrial robots, we developed a system that can automatically decake parts in a fast and efficient way. Through a series of decaking experiments performed on parts printed by a Multi Jet Fusion printer, we demonstrated the feasibility of robotic decaking for 3D-printing-based mass manufacturing.
MoboTSP: Solving the Task Sequencing Problem for Mobile Manipulators
Nicholas Adrian, Quang-Cuong Pham
in preparation, arXiv 2020
[preprint] [video]
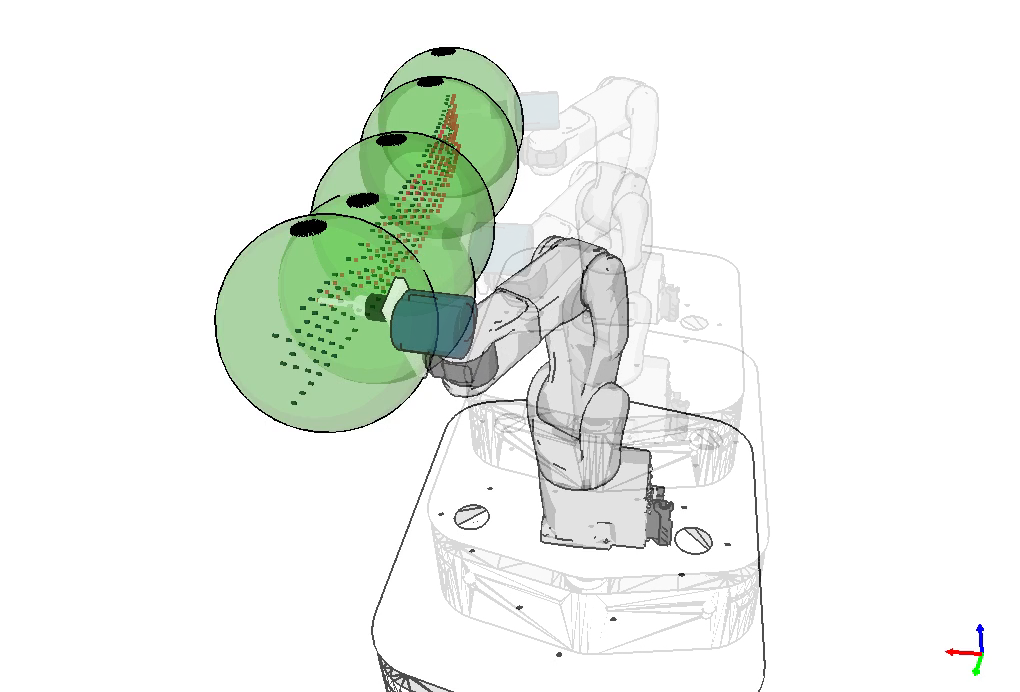
A frequent task for a mobile manipulator is to visit a set of ordered or unordered targets scattered around the workspace: think for example of drilling multiple holes on aircraft fuselages or mobile 3D-printing of large workpieces. We introduce a new approach to tackle the mobile manipulator task sequencing problem. We leverage computational geometry, graph theory and combinatorial optimization to yield a principled method to segment the task-space targets into clusters, analytically determine reachable base pose for each cluster, and find task sequences that minimize the number of base movements and robot execution time. By clustering targets first and by doing so from first principles, our solution is more general and computationally efficient when compared to existing methods.
Locating Transparent Objects to Millimetre Accuracy
Nicholas Adrian, Quang-Cuong Pham
in preparation, arXiv 2019
[preprint] [video]
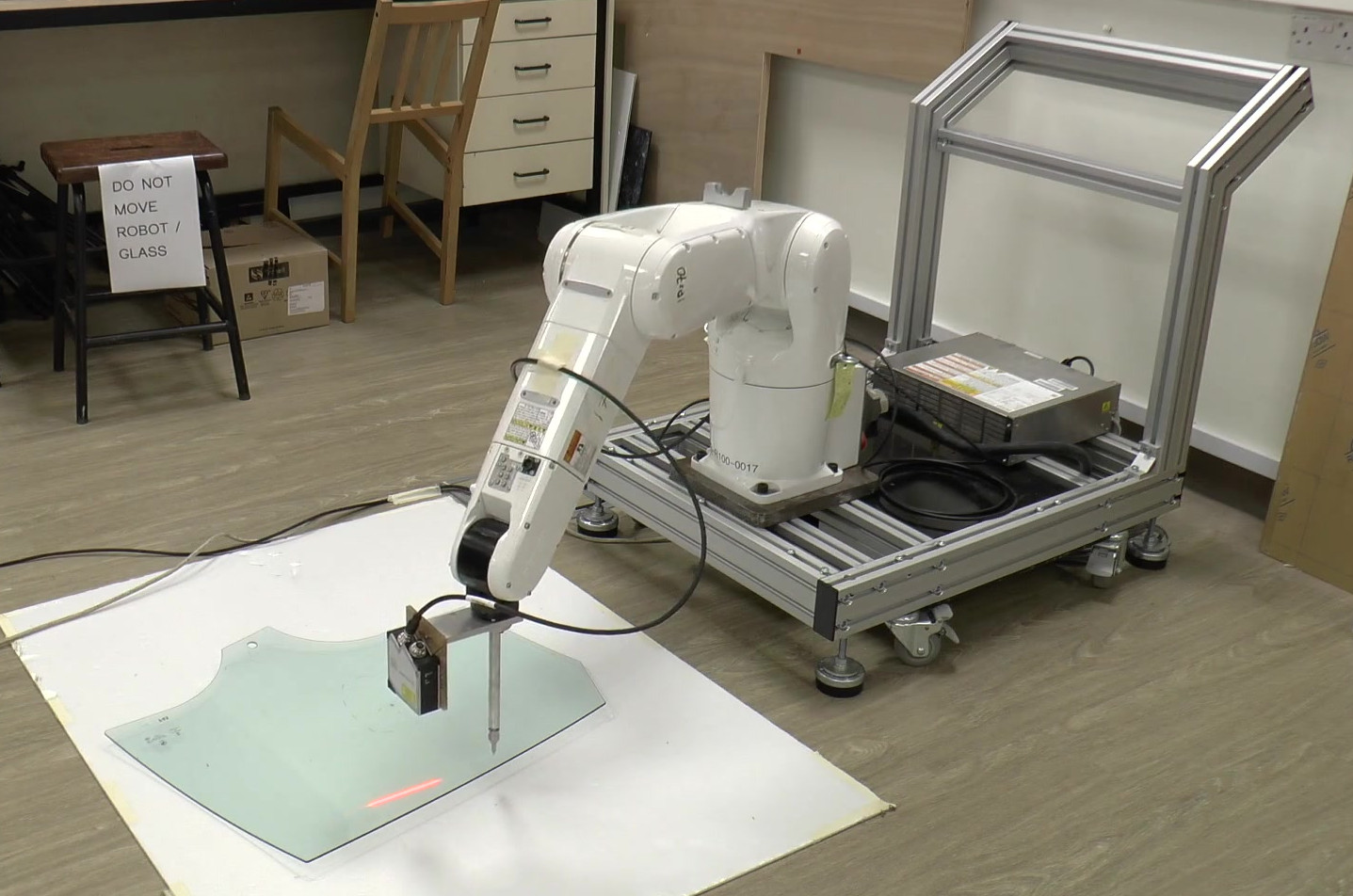
Transparent surfaces, such as glass, transmit most of the visible light that falls on them, making accurate pose- estimation challenging. We propose a method to locate glass objects to millimetre accuracy using a simple Laser Range Finder (LRF) attached to the robot end-effector. The method, derived from a physical understanding of laser-glass interac- tions, consists of (i) sampling points on the glass border by looking at the glass surface from an angle of approximately 45 degrees, and (ii) performing Iterative Closest Point registration on the sampled points. We verify experimentally that the proposed method can locate a transparent, non-planar, side car glass to millimetre accuracy.
MBZIRC
Abu Dhabi, 2017
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) is an international robotics competition consisting of ambitious and technologically demanding set of challenges. My team and I represented NTU Singapore as one of the 25 team finalists to compete in Abu Dhabi for the 2017 final. I participated in Challenge 2 which required a mobile manipulator to navigate towards the target workspace, detect suitable wrench and manipulate on a valve. The experience has been influential in solidifying my desire to pursue robotics research.
SwarmX
Singapore, 2016
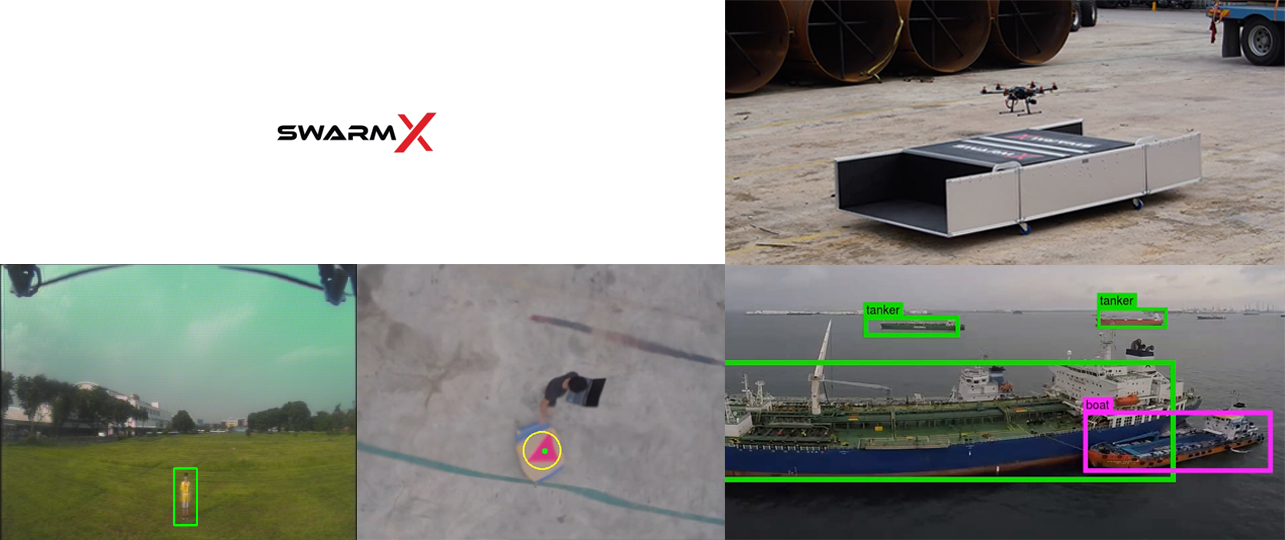
SwarmX was founded in 2015 with the aim to fully automate drone operation with their custom built drones and autonomous drone docking station. In 2016, I joined the company as an intern and was tasked to develop computer vision solutions for their aerial surveillance tasks.
Nanyang Venture 8
2014-2016
Nanyang Venture 8 is Singapore's first 3D printed electric vehicle. The vehicle was originally built for the annual Shell Eco Marathon Asia competition. The team has gone on to compete in Manila (2015 and 2016) before being invited for the international Drivers' World Championship at Queen Elizabeth Olympic Park in London (2016). My main role was to lead the design and fabrication of the car's lighting system. Throughout this stint, I had picked up on various mechatronics and fabrication skills.