
Integrated Hardware-Software Development of Dynamic Whole-Body Humanoid Control
(in progress)
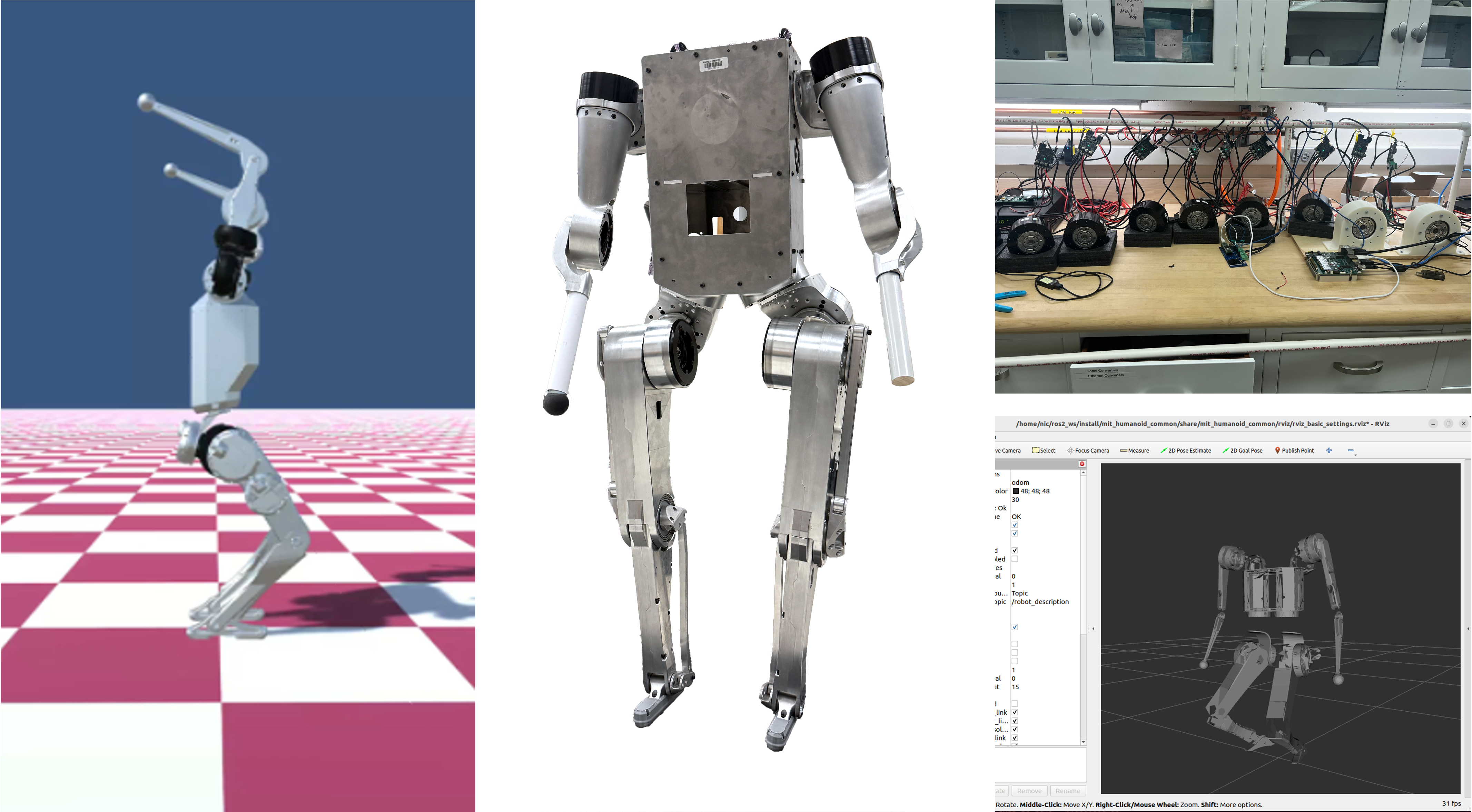
Forward Dynamics Algorithm for Next-Generation Humanoid Robot Transmissions
Matthew Chignoli, Nicholas Adrian, Sangbae Kim, Patrick M. Wensing
IEEE Transactions on Robotics 2025
[preprint] [code]
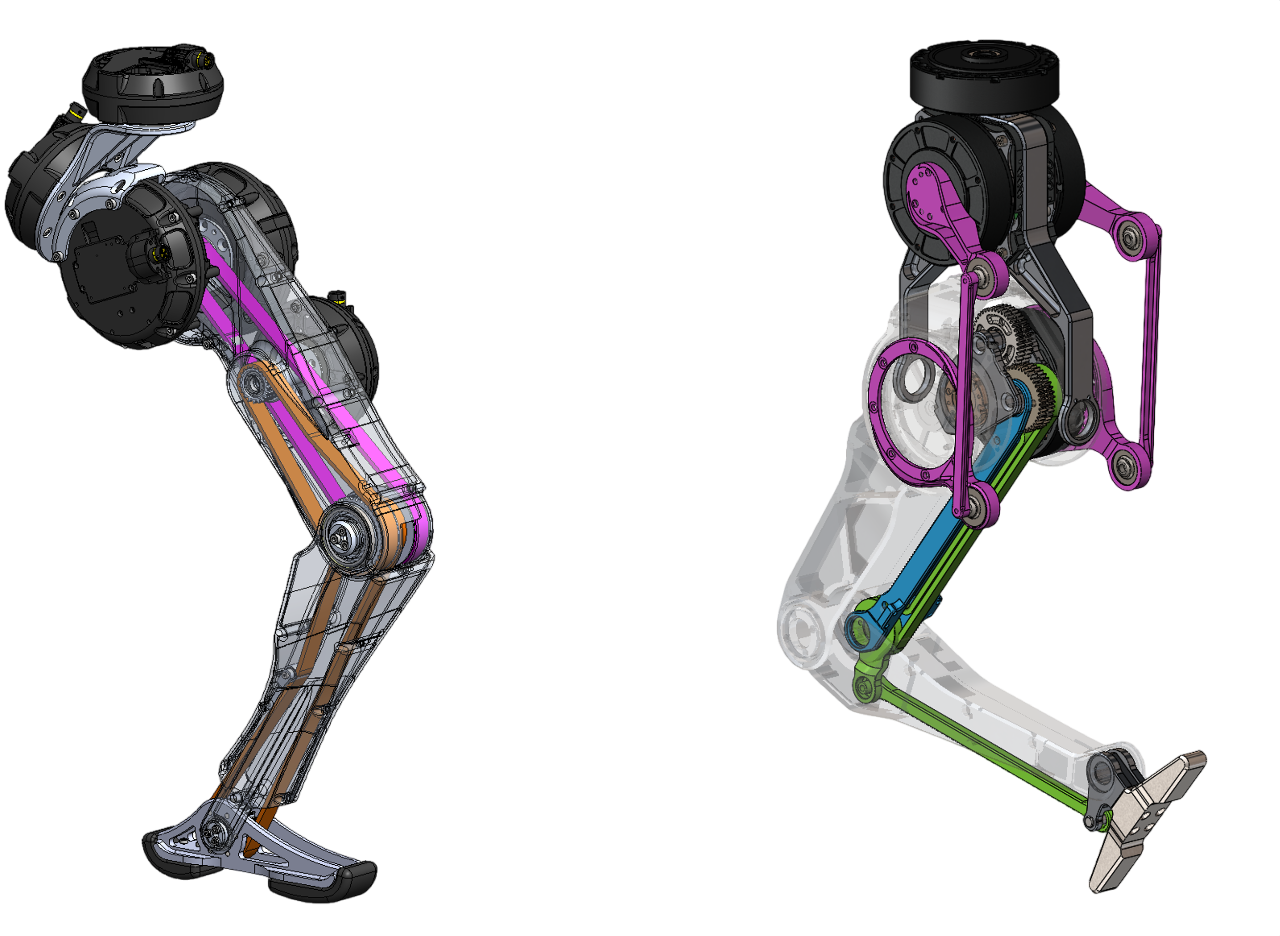
Emerging actuation submechanisms in modern humanoid robots, including geared motors, differential drives, and four-bar linkages, introduce new challenges for accurate and efficient dynamic computation. We present a propagation based derivation of a recursive forward dynamics algorithm that (1) scales linearly with the number of actuation submechanisms, (2) is formulated using physically intuitive spatial vector algebra, and (3) is released as open source.
Hybrid Classical/Learning-based Visual Servoing for Cluttered Environment
Nicholas Adrian, Van-Thach Do, Quang-Cuong Pham
IEEE International Conference on Automation Science and Engineering 2022
[preprint] [video]
Industrial 3D printing produces objects with significant day-to-day variation, making post-processing tasks such as pick-and-place and defect inspection difficult to automate. Object-specific grasping constraints and the rapid introduction of new geometries limit the feasibility of handcrafted algorithms or data-driven models requiring retraining. We propose a generalizable approach that combines a deep neural network for feature matching without additional training, classical visual servoing, and automatic target-image generation via a render engine. The method performs robustly across diverse and cluttered 3D-printed objects and resulted in an intellectual property application with HP Inc.
Robotic System for Automated 3D-Printed Post-Processing
Huy Nguyen, Nicholas Adrian, Joyce Lim Xin Yan, Jonathan M. Salfity, William Allen, Quang-Cuong Pham
IEEE International Conference on Robotics and Automation 2020
[preprint] [video]
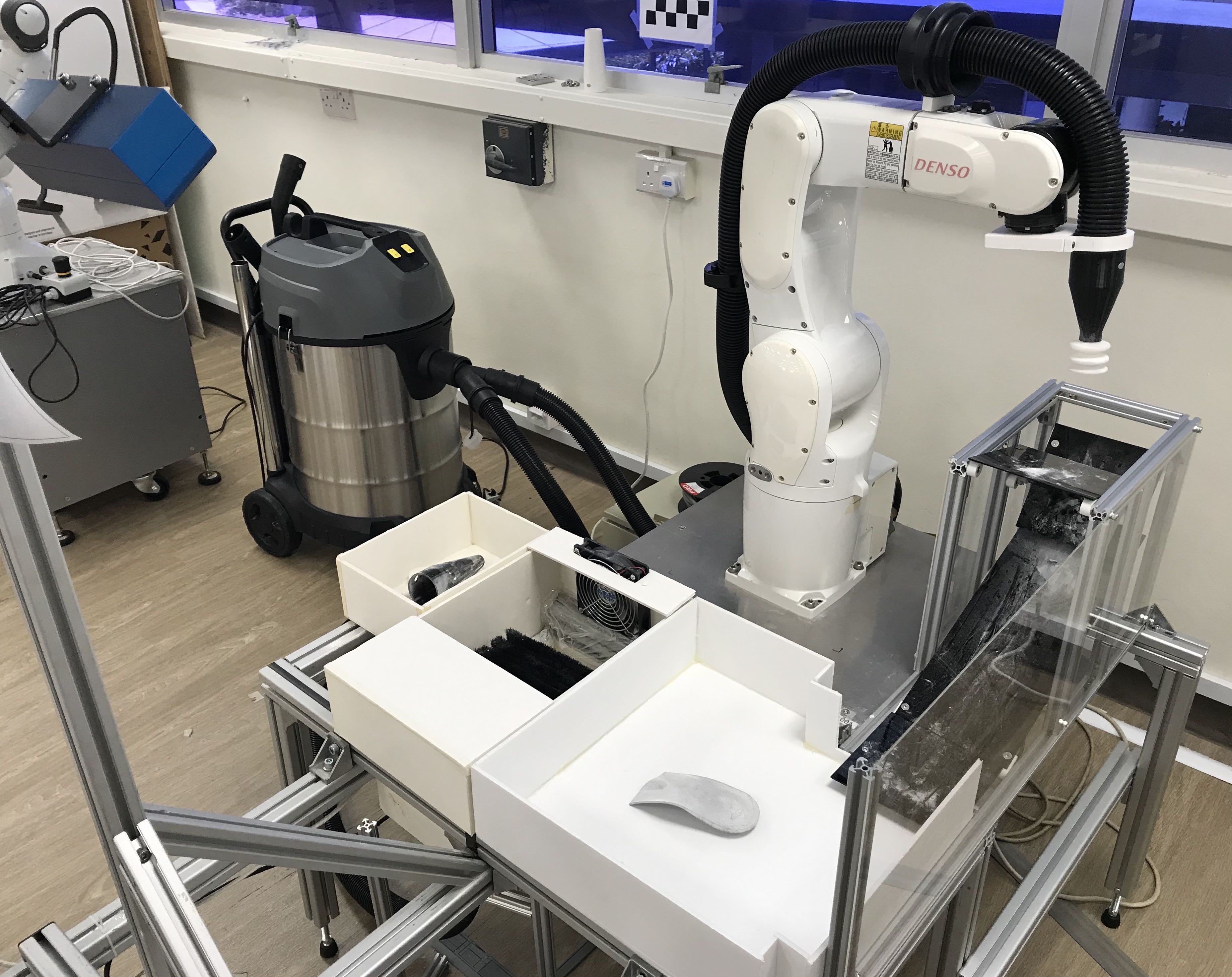
Cleaning residual powder from 3D-printed parts remains a major bottleneck in establishing industrial 3D printing as a viable mass-manufacturing method. To address this challenge for HP Inc., we developed a proof-of-concept automated robotic system that integrates deep learning for 3D perception, intelligent mechanical design, motion planning, and force control. This work culminated in an awarded patent.
Mobile Manipulator Task-Planning
Quang-Nam Nguyen, Nicholas Adrian, Quang-Cuong Pham
IEEE International Conference on Robotics and Automation 2023
[preprint] [video]
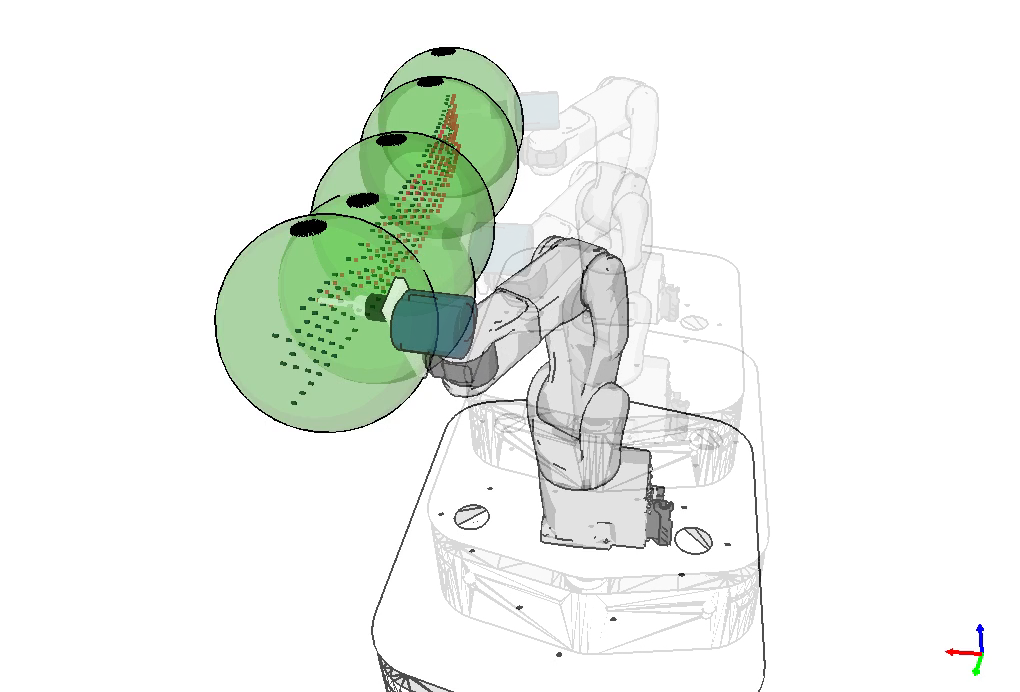
Deploying industrial mobile manipulators often involves visiting multiple target locations distributed across a large workspace, such as drilling holes on aircraft fuselages or performing infrastructure inspections. We address this task-sequencing challenge by leveraging computational geometry, graph theory, and combinatorial optimization to develop a principled method that minimizes both the number of base movements and the overall robot execution time.
Locating Transparent Objects to Millimetre Accuracy
Nicholas Adrian, Quang-Cuong Pham (2019)
[preprint] [video]
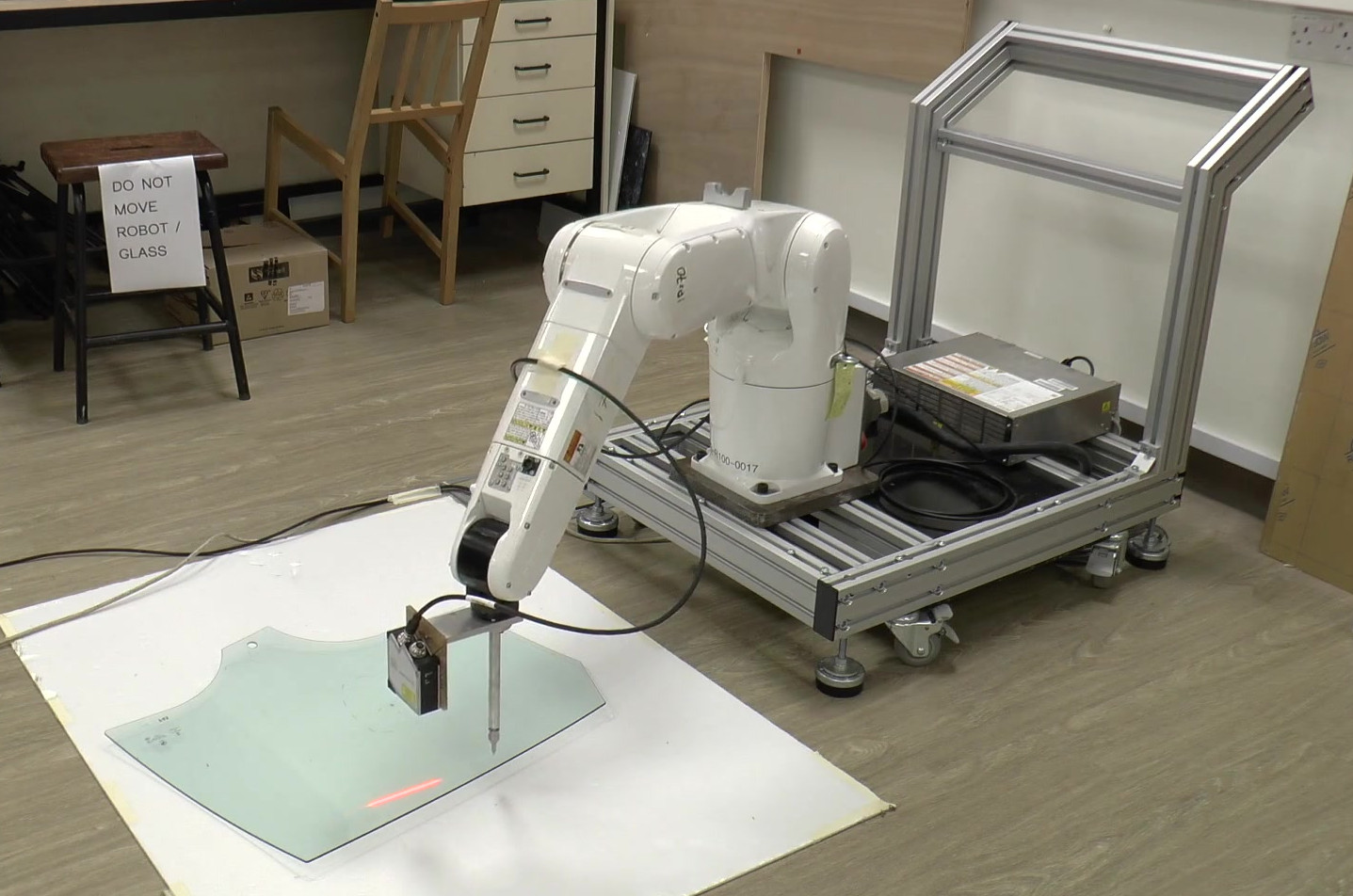
An automobile manufacturer aimed to shorten its assembly cycle for low-volume, customizable vehicles. A major bottleneck was automating windshield installation, which traditionally requires custom mechanical jigs and manual robot programming for each new design. We developed a jig-free approach that uses a low-cost laser range finder to detect the pose of transparent windshields. Using Iterative Closest Point (ICP) registration, the system estimates the windshield’s position and orientation to within a few millimetres, enabling more flexible and efficient automation.
MBZIRC: International Robotics Competition
Abu Dhabi, 2017
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) is an international robotics competition consisting of ambitious and technologically demanding set of challenges. My team and I represented Nanyang Technological University (Singapore) as one of the 25 team finalists to compete in Abu Dhabi for the 2017 final. I participated in Challenge 2 which required a mobile manipulator to navigate towards the target workspace, detect suitable wrench and manipulate on a valve.
SwarmX: Drone Automation Robotics Startup
Singapore, 2016
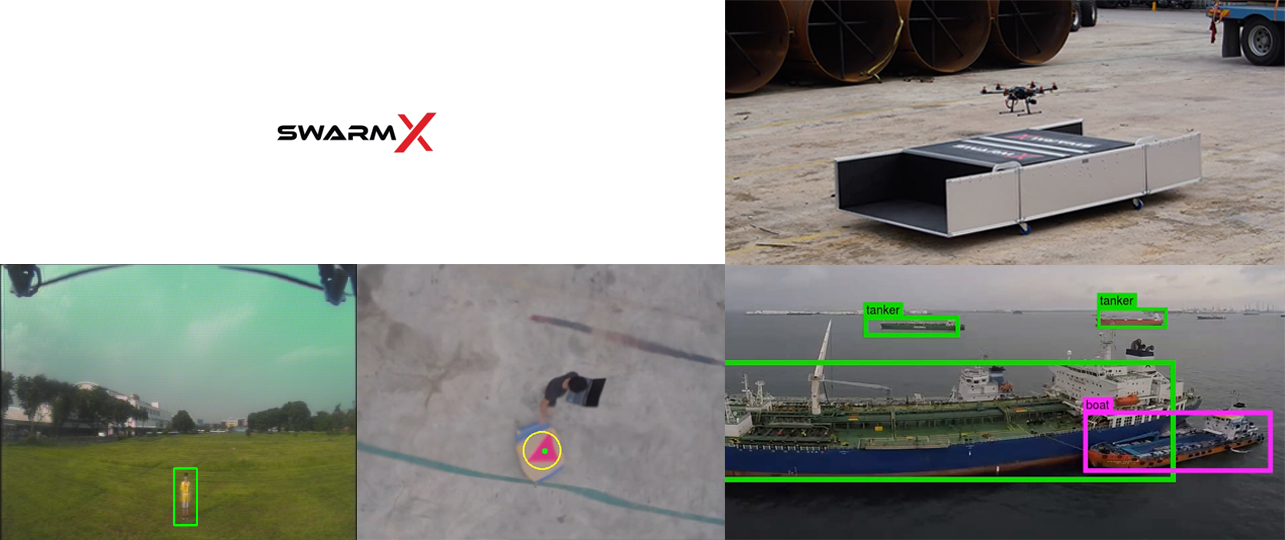
SwarmX was founded in 2015 with the goal of fully automating drone operations through custom-built drones and an autonomous docking station. I joined the company in 2016 as an intern, where I developed computer vision solutions and software infrastructure to support aerial surveillance tasks.
Nanyang Venture 8: Electric Vehicle Competition
2014-2016
Nanyang Venture 8 is Singapore's first 3D printed electric vehicle. The vehicle was originally built for the annual Shell Eco Marathon Asia competition. The team has gone on to compete in Manila (2015 and 2016) before being invited for the international Drivers' World Championship at Queen Elizabeth Olympic Park in London (2016). My primary role was to lead the end-to-end design and fabrication of the car’s lighting system, covering everything from concept development and electronics design to fabrication, assembly, and on-vehicle installation.